3.3.4 Roboty kroczące
3.3.4. Roboty kroczące
Inną grupą robotów, szybko rozwijającą się, są roboty kroczące, czyli urządzenia techniczne przeznaczone do realizacji wybranych funkcji podobnych do funkcji lokomocyjnych zwierząt i owadów posiadających kończyny (kręgowce) lub odnóża (owady).
|
|
|
|
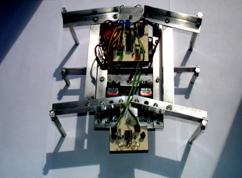
Rysunek 3.57 Robot kroczący w=3 |
Rysunek 3.58 Robot kroczący w=12 |

Na rys. 3.57 przedstawiono robota sześcionożnego o 3 stopniach swobody wykonanego w KRiDM AGH, to urządzenie mechatroniczne wykorzystuje ruch falowy do poruszania się dodatkowo został wyposażony w czujniki podczerwieni do wykrywania przeszkód.
Inną interesującą konstrukcją robota również wykonanego w KRiDM jest konstrukcja sześcionożnej maszyny kroczącej o 12 stopniach swobody, przedstawiona na rys. 3.58. Robot ten zamiast konwencjonalnych napędów posiada materiał inteligentny nitinol, który pod wpływem przepływającego prądu zmienia swoje własności (ulega skróceniu). Każdy pedipulator tego robota posiada 2 stopnie swobody, dodatkowo jest on wyposażony w kamerę umożliwiając dokonywania inspekcji obszaru.
|
|
|
|
Rysunek 3.59 Robot firmy SOLARBOTICS |
Rysunek 3.60 Widok z przodu w=2 |
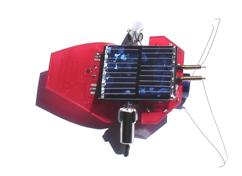
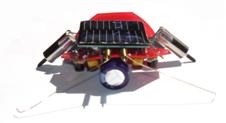
Interesującymi rozwiązaniami konstrukcyjnymi są również mobilne roboty budowane na bazie rozwiązań zaczerpniętych z natury tzw. BEAM akronim takich pojęć jak Biologia, Elektronika, Estetyka wykonania, Mechanika. Tego typu roboty, przykład przedstawiono na rys.3.59 oraz rys.3.60, posiadają własne źródło energii odpowiednie układy sensoryczne oraz układ elektroniczny umożliwiający zorganizowane poruszanie się robota.
Przykładem dwunożnego robota kroczącego jest robot P3 firmy HONDA jest to jeden z najbardziej rozwiniętych technologicznie robotów kroczących, jaki został kiedykolwiek skonstruowany przez człowieka. Robot ten został przedstawiony na rys. 3.61.
|
|
|
Rysunek 3.61 Robot P3 firmy HONDA |

Oczywiście istnieje wiele rozwiązań konstrukcyjnych tego typu robotów, starają się one naśladować rozwiązania występujące w naturze u zwierząt lub owadów. Przykładowo można znaleźć rozwiązania maszyn kroczących wykorzystujących ogon do utrzymywania równowagi, jest to rozwiązanie często występujące w przyrodzie.
Przykłady innych robotów:
 |
 |
Zobacz też:







