Roboty modelują masę plastyczną
Nowy system pozwala robotom manipulować miękkim, odkształcającym się materiałem, formując z niego różne kształty na podstawie informacji wizualnych, co pewnego dnia poskutkuje stworzeniem lepszych asystentów domowych.
Wewnętrzne dziecko w wielu z nas odczuwa ogromną radość, gdy natknie się na fluorescencyjną, gumową mieszankę wody, soli i mąki, która wprowadziła go w świat zabawy masą plastyczną (Nawet jeśli w dorosłym życiu zdarza się to rzadko).
Podczas gdy manipulowanie ciastem jest zabawne i łatwe dla dwulatków, to dla robotów stanowi wyzwanie. Maszyny stają się coraz bardziej niezawodne w pracy ze sztywnymi obiektami, ale manipulowanie miękkimi, odkształcalnymi się obiektami związane jest z listą wyzwań technicznych. Najtrudniejszym z nich jest delikatne i sensoryczne uformowanie kształtu z masy, która, podobnie jak większość elastycznych struktur, ulega zdeformowaniu w całości podczas modelowania tylko części masy.
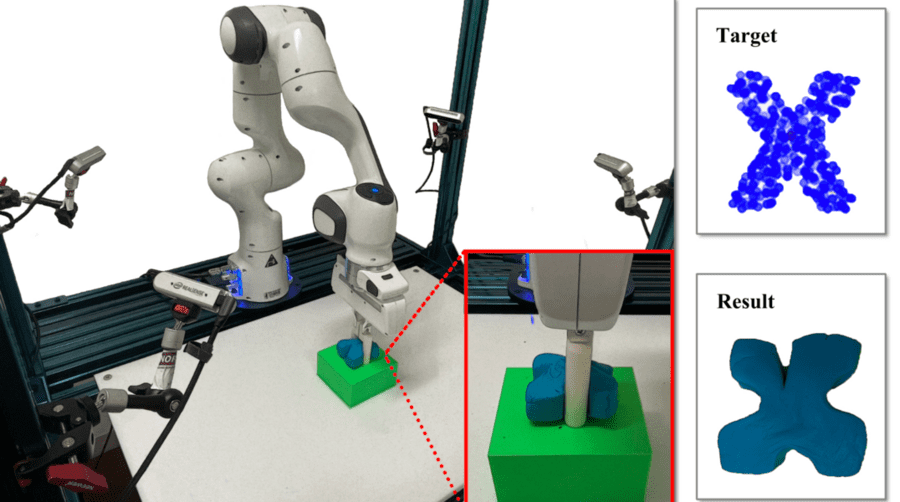
Naukowcy z Laboratorium Informatyki i Sztucznej Inteligencji MIT (CSAIL) oraz Uniwersytetu Stanforda zlecili robotom formowanie masy modelarskiej. Praca robotów na masie plastycznej ma za zadanie przetestować nowy system, który uczy się bezpośrednio na podstawie danych wizualnych, pozwalając robotowi z dwupalczastym chwytakiem, widzieć, symulować i kształtować obiekty z ciasta. System “RoboCraft” w niezawodny sposób koordynował zachowanie robota, który chwytał i zwalniał masę modelarską, tworząc różne litery, w tym takie, których nigdy nie widział. Po zaledwie 10 minutach optymalizowania danych, dwupalczasty chwytak rywalizował z ludzkimi odpowiednikami, którzy teleoperowali maszyną. Robot wspomagany systemem “RoboCraft“ samodzielnie wykonywał testowane zadania na równi z, a nawet lepiej od człowieka.
“Modelowanie i manipulowanie obiektami o dużych stopniach swobody są niezbędnymi zdolnościami dla robotów, które mogą nauczyć się, jak wykonywać złożone zadania przemysłowe i domowe, takie jak nadziewanie pierogów, zwijanie sushi czy wyrabianie ceramiki” – mówi Yunzhu Li, doktorant CSAIL i autor nowego artykułu o RoboCraft. “Gdy w ostatnim czasie dokonano postępu w manipulowaniu ubraniami i linami, odkryliśmy, że obiekty o wysokiej plastyczności, takie jak ciasto czy plastelina – pomimo wszechobecności w domowych i przemysłowych warunkach – były w dużej mierze niezbadanym terytorium. W RoboCraft uczymy się modeli dynamiki bezpośrednio z wysokowymiarowych danych sensorycznych, co oferuje obiecującą drogę opartą na danych, która pozwoli nam na efektywne planowanie działań robota“.
W przypadku nieokreślonego, gładkiego materiału, cała struktura musi być uwzględniona zanim będzie można wykonać jakikolwiek rodzaj wydajnego i efektywnego modelowania i planowania. Dzięki połączeniu przekształcenia obrazów w grafy małych cząsteczek z algorytmami RoboCraft, wykorzystując grafową sieć neuronową jako model dynamiki, dokonuje dokładniejszych przewidywań dotyczących zmiany kształtu materiału.
Zazwyczaj badacze używali skomplikowanych symulatorów fizyki do modelowania i zrozumienia siły i dynamiki oddziałującej na obiekty, ale RoboCraft wykorzystuje po prostu dane wizualne. Wewnętrzne działanie systemu opiera się na trzech częściach, które kształtują miękki materiał na przykład w literę “R”.
Pierwsza część – percepcja – polega na nauce “widzenia”. Robot wykorzystuje kamery do zbierania surowych, wizualnych danych czujników z otoczenia, które są następnie przekształcane w małe chmury cząstek do reprezentowania kształtów. Po tym sieć neuronowa oparta na grafie wykorzystuje wspomniane dane cząsteczek, aby nauczyć się “symulować” dynamikę obiektu, czyli to, jak on się porusza. Następnie, algorytmy pomagają zaplanować zachowanie robota tak, aby nauczył się “kształtować” płat ciasta, poprzez uzupełnianie informacji o dane treningowe z wielu uszczypnięć. Chociaż litery są nieco luźne, są bez wątpienia reprezentatywne.
Zespół pracuje obecnie nad dopracowaniem robota, tak aby poza modelowaniem prostych kształtów, był w stanie zrobić na przykład pierogi z ciasta i przygotowanego nadzienia. Na ten moment to duże wyzwanie dla robota, który jest wyposażony jedynie w dwupalczasty chwytak. RoboCraft potrzebowałby dodatkowych narzędzi (piekarz potrzebuje wielu narzędzi do gotowania, podobnie jak roboty) – wałka do ciasta, stempla i formy.
Bardziej odległą dziedziną, którą naukowcy przewidują jest wykorzystanie RoboCraft do pomocy w pracach domowych, co mogłoby być szczególnie pomocne dla osób starszych lub tych z ograniczoną mobilnością. Biorąc pod uwagę wiele przeszkód, które mogą mieć miejsce, aby to osiągnąć potrzebne byłoby zwiększenie adopcyjności robota w obsłudze elastycznych, a także zbadanie, jaka klasa modeli może być odpowiednia do uchwycenia podstawowych systemów strukturalnych.
“RoboCraft zasadniczo pokazuje, że ten model predykcyjny może być uczony w bardzo wydajny dla danych sposób, aby zaplanować ruch. W dłuższej perspektywie myślimy o wykorzystaniu różnych narzędzi do manipulowania materiałami” – mówi Li. “Jeden chwytak nie jest w stanie podjąć się lepienia pierogów lub ciasta. Pomaganie modelowi w zrozumieniu i realizacji zadań planowania w dłuższym horyzoncie czasowym, takich jak deformacja ciasta, biorąc pod uwagę aktualne narzędzia, ruchy i działania, jest kolejnym krokiem dla przyszłych prac”.
Li napisał pracę wraz z Haochen Shi, studentem studiów magisterskich na Stanfordzie; Huazhe Xu, stażystą podoktorskim na Stanfordzie; Zhiao Huang, doktorantem na Uniwersytecie Kalifornijskim w San Diego; oraz Jiajun Wu, asystentem na Stanfordzie.
Zobacz też:







