#RoboTemat: Polscy naukowcy ze Stowarzyszenia robotyków SKALP budują roboty rolnicze

Z Mateuszem Dyrdą ze Stowarzyszenia Robotyków SKALP rozmawiamy o ich projekcie robota rolniczego, zautomatyzowanego pola uprawnego oraz o przyszłości rolnictwa. Polski naukowiec wyjaśnia nam dlaczego robotyka i automatyzacja będą brały coraz większy udział w uprawie rolnej.
Mateusz Tomanek, robotyka.pl: Czym jest stowarzyszenie SKALP?
Jesteśmy grupą osób, które zajmują się technologią na co dzień, fascynują się tymi technologiami od różnej strony. Wśród nas są osoby, które zajmują się wdrażaniem nowoczesnych rozwiązań i konstrukcji, mamy badaczy, którzy zajmują się robotyką, algorytmami i sztuczną inteligencją. Mamy też pasjonatów, którzy zajmują się tematem robotyki i automatyki od strony mniej technicznej. Zajmują się prawem i odpowiedzialnością pojazdów autonomicznych czy też artystami, którzy w swoich pracach chcą inkorporować nowoczesną technologię i z niej korzystać.
M.T.: Skąd się wziął pomysł na konstrukcję robota rolniczego ŻukBot?
Wszystko zaczęło się od konkursu Field Robot Event, który dotyczył autonomicznych robotów rolniczych. W ramach dwóch edycji tego konkursu przygotowaliśmy dwie konstrukcje. Pierwsza miała dosyć dużo wad, ale to były dopiero przymiarki do naszego robota rolniczego. Drugiej konstrukcji poszło już znacznie lepiej.
Pomysł bezpośrednio wziął się z faktu, że w naszym stowarzyszeniu zebrało się wystarczająco dużo osób, które jednocześnie zajmują się robotyką i mają pewien rolniczy background. To były osoby, których rodziny posiadają gospodarstwa rolne i dzięki temu posiadały pewne podstawy wiedzy o rolnictwie. Dzięki temu połączyły wiedzę z dwóch wydawałoby się odległych od siebie dziedzin. To jest właśnie dodatkową zaletą naszego stowarzyszenia SKALP, ponieważ my staramy się rekrutować naszych członków jak najszerzej i z tego powodu u nas pojawiają się osoby, które się uzupełniają w umiejętnościach i zainteresowaniach. Jak widać pomaga to tworzyć naprawdę fajne rozwiązania.
M.T.: To trochę jak działalność kół naukowych
Tak. Mieliśmy i mamy cały czas do czynienia z kołami naukowymi, ponieważ wielu naszych członków działało w takich inicjatywach studenckich. Dzisiaj również je wspieramy, ponieważ jesteśmy organizacją, która może zbierać fundusze i która pomaga zarządzać projektami. Pomagamy studentom zdobywać wiedzę na temat tego jak prowadzić projekty w taki sposób, żeby one odniosły sukces. Ciężko jest określić tak naprawdę czym dokładnie jest stowarzyszenie SKALP, ponieważ takich instytucji w Polsce jeszcze nie ma. Z jednej strony my nie jesteśmy organizacją komercyjną i wypracowywanie zysku nie jest naszym priorytetem, ale chcemy zajmować badaniami komercyjnymi i chcemy budować nowe technologie dla przemysłu i w przyszłości zapełnić lukę, która jest na rynku.
M.T.: Jaką lukę ma Pan na myśli?
Brak w Polsce takich instytucji, które będą trochę jak uczelnia, ale będą też bliżej biznesu i będą zdecydowanie szybciej i lepiej działać.
M.T.: Jakie jest podstawowe zastosowanie ŻukBota?
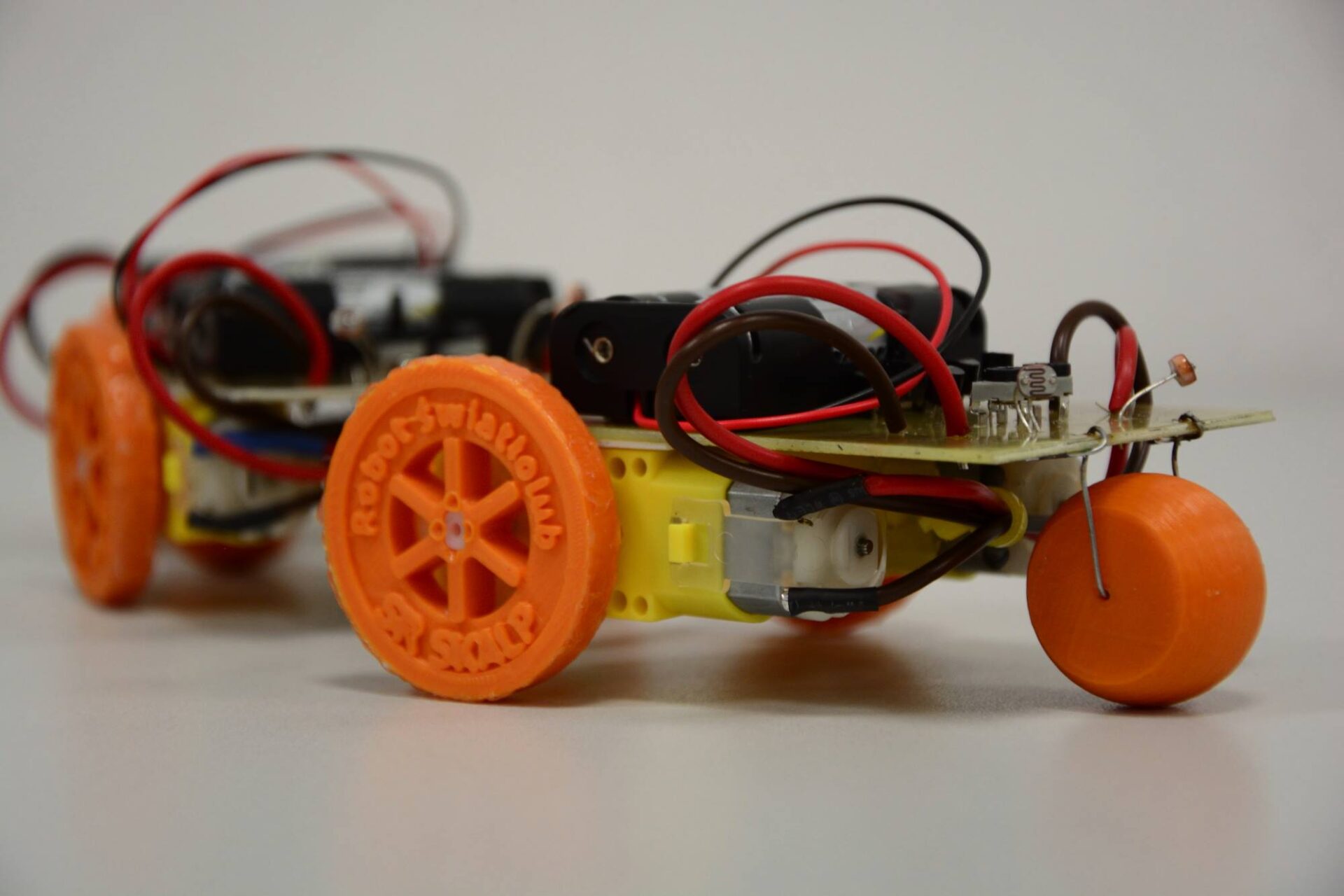
Żukbot był przede wszystkim konkursowym robotem. Pierwsza edycja tego konkursu polegała na tym, że robot miał całkowicie autonomicznie przejechać przez pole i miał samodzielnie móc zasiać precyzyjnie określoną ilość nasion. Ponadto miał odstraszać szkodniki i w tym celu miał zamontowany głośnik. Jego dodatkową funkcją, którą sami zaproponowaliśmy była detekcja i pomiar siły promieniowania na polu. Nasz ŻukBot był wyposażony w licznik Geigera i dzięki temu mógł wykrywać promieniowanie w danym miejscu. Taki robot mógłby się przydać do rewitalizacji obszarów, które są skażone promieniowaniem. Tej pierwszej wersji, tak jak mówiłem, najlepiej nie poszło.
Druga wersja, która brała udział w kolejnej edycji konkursu miała już do wykonania trochę inne zadania. Najważniejszą cechą zawodów Field Robot Event jest to, że roboty startujące w tym konkursie muszą być całkowicie autonomiczne. Operatorzy w żaden sposób nie mogą wpływać na pracę robota od momentu jego uruchomienia. Co ważne, w drugiej edycji robot miał samodzielnie wykryć chwasty, a dokładniej mówiąc markery, które symbolizowały chwasty, a potem precyzyjnie je opryskać jednocześnie nie opryskując okolicznych roślin. Dzięki zastosowaniu technologii przetwarzania obrazu i algorytmów sztucznej inteligencji udało nam się to osiągnąć i nasz zespół zajął pierwsze miejsce w konkurencji oprysku precyzyjnego.
M.T.: Czy pracujecie obecnie nad rozwinięciem ŻukBota?
Po opracowaniu tej drugiej wersji braliśmy udział w konkursie European Space Navigation Competition, który był organizowany między innymi przez Europejską Agencję Kosmiczną. Zostaliśmy laureatami polskiej edycji na najlepsze wykorzystanie nowoczesnych technologii satelitarnych. Udało nam się w polskiej edycji, ale niestety nie udało nam się zdobyć lauru w edycji ogólnoeuropejskiej. Mimo tego mieliśmy okazje przejechać się na rozdanie nagród, gdzie mieliśmy okazje porozmawiać z ludźmi, którzy się tym zajmują. Oprócz tego byliśmy na kilku konferencjach rolniczych i poznaliśmy realne potrzeby rolników. Mieliśmy dzięki temu szansę dowiedzieć się jak się rozwija ten rynek. Samego ŻukBota już nie opracowywaliśmy, ponieważ straciliśmy zainteresowanie startowaniem w samych konkursach.
Czytaj więcej: Robot, który sam przywiezie na imprezę piwo – Robotyka
M.T.: To znaczy, że projekt ostatecznie został zarzucony?
Projekt ŻukBota został zakończony, ale nie do końca, ponieważ pracujemy nad rozwinięciem idei robotyki w rolnictwie. Zaczęliśmy się zastanawiać nad tym jak wykorzystać nowoczesną technologię w rolnictwie i doszliśmy do wniosku, że małe roboty rolnicze nie mają sensu komercyjnego. Jeśli chodzi o automatyzację to będzie ona implementowana do dużych maszyn na bazie istniejących kombajnów i ciągników. Polegać to będzie po prostu do dokładaniu warstwy autonomii do tych urządzeń.
M.T.: Jak planujecie rozwinąć ideę robotyki w rolnictwie?
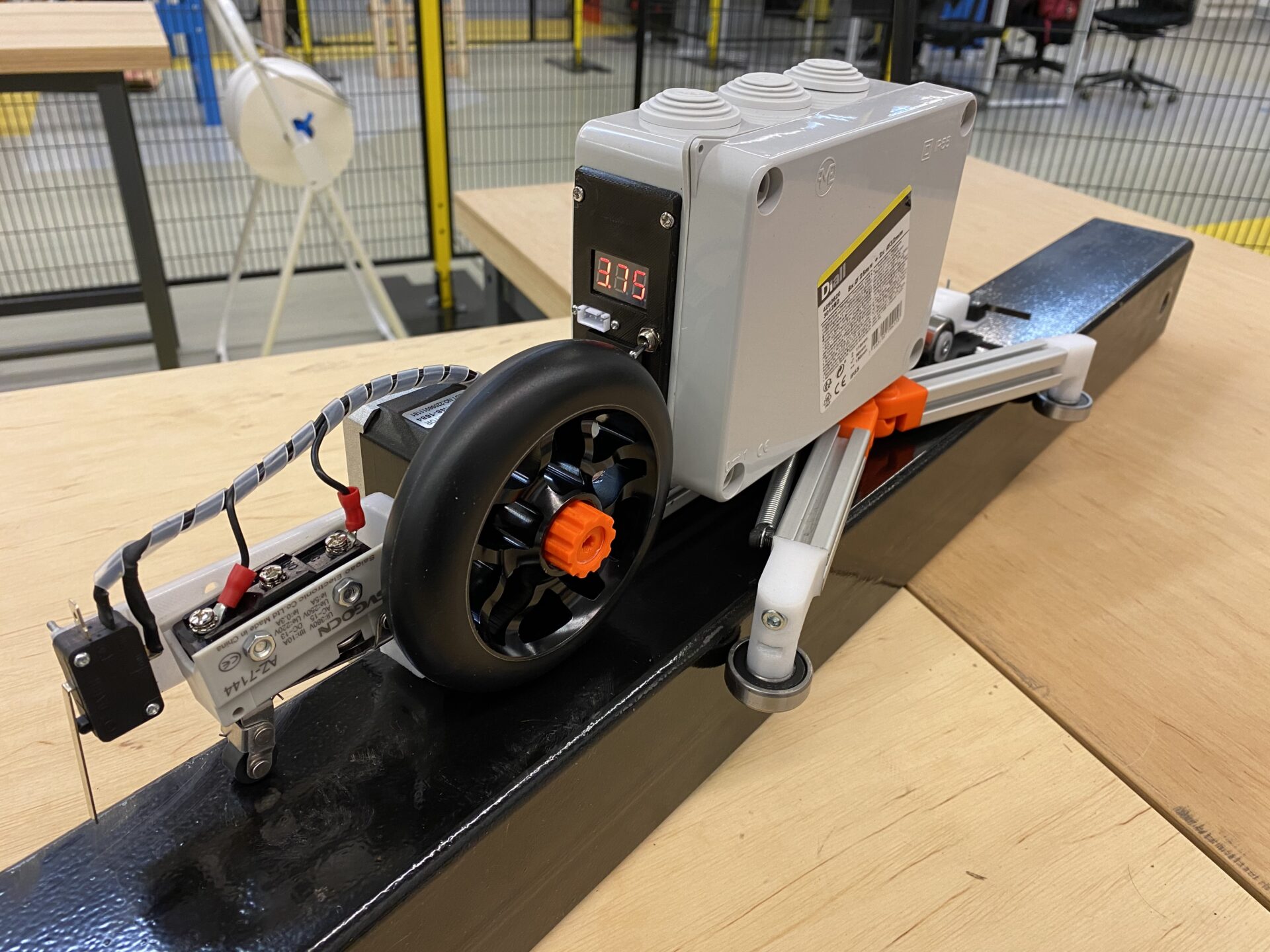
Jesteśmy na początku realizacji innego pomysłu, a mianowicie w stu procentach zautomatyzowanego pola uprawnego. Chcemy wykorzystać do tego robota stacjonarnego, który jest montowany na polu. Zajmuje się on autonomiczną uprawą takiego pola. Nie chcę za dużo o tym mówić, ale do końca roku chcemy rozwinąć tą koncepcję. To już jest projekt na wpół badawczy i na wpół komercyjny.
Po tych analizach, o których wcześniej wspomniałem doszliśmy po prostu do wniosku, że to faktycznie może mieć sens – także komercyjny. Zautomatyzowane pole uprawne pozwoli na bardzo precyzyjną uprawę i całkowite wyeliminowanie użycia pestycydów. Zamiast stosowania oprysków chwasty będą niszczone mechanicznie wykorzystując sztuczną inteligencję. Zresztą nasz pomysł na automatyzowane pole uprawne idzie o wiele dalej, ponieważ dzięki niemu będzie możliwe precyzyjne gospodarowanie wodą czy podnoszenie klasy ziemi.
M.T.: Robot będzie podwyższał klasę ziemi?
Tak uważam. Obecnie jeśli klasa ziemi jest zbyt niska, to rolnik musi stosować sztuczne nawozy, aby podnieść jej klasę. Środki chemiczne jednak mają negatywny wpływ na środowisko. Uważamy, że wykorzystanie naszego pola uprawnego pozwoli na podniesienie klasy ziemi w ciągu kilku sezonów.
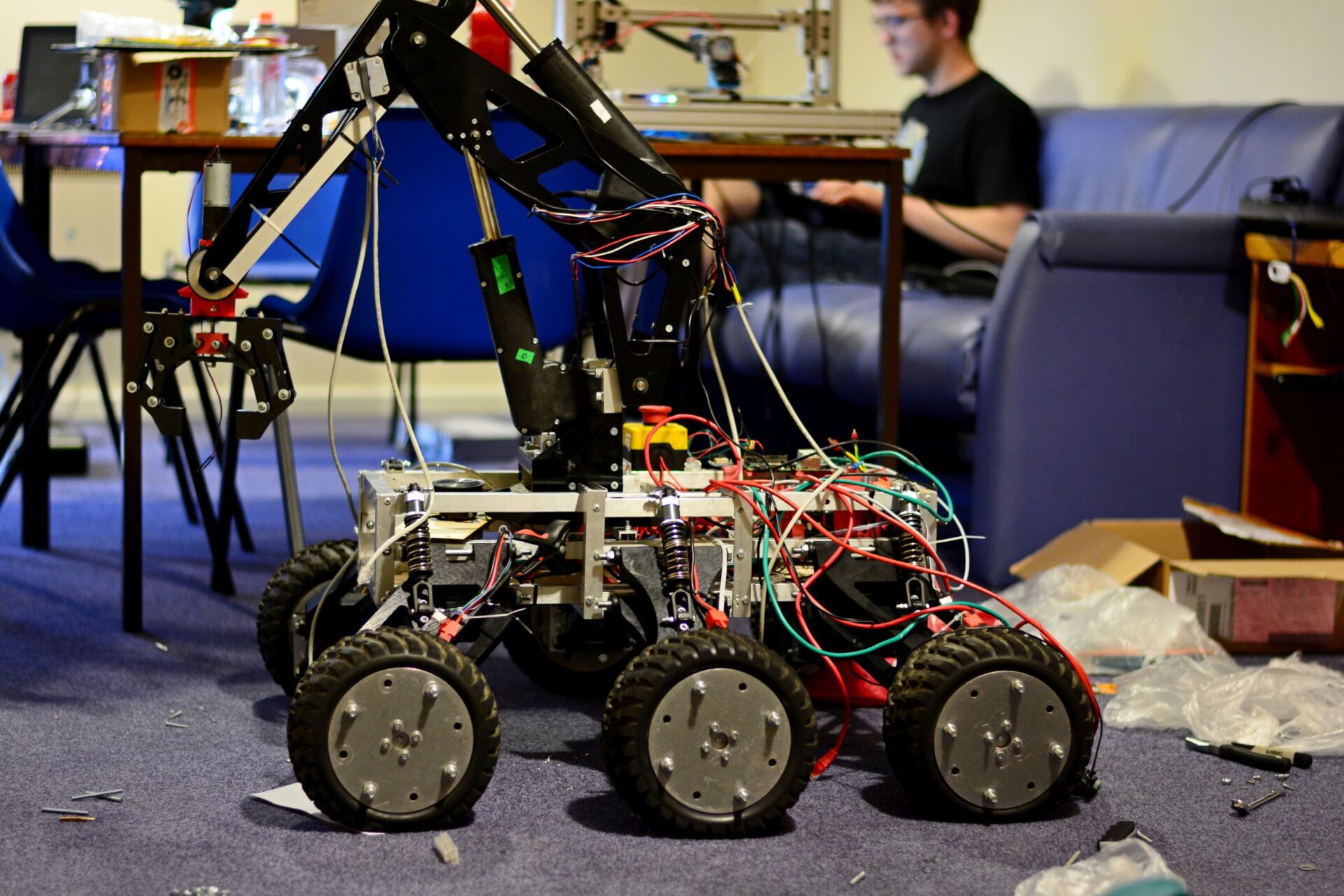
W tej chwili rolnictwo wielkoobszarowe wygląda tak, że nagina ono warunki naturalne do swoich potrzeb. Dużym problem jest to, że zasiewając na wielu hektarach pszenicę dajemy do niej dostęp szkodnikom, które nie mają barier biologicznych z uwagi na małą bioróżnorodność. Aby się ich pozbyć stosowane są opryski, których my chcemy uniknąć. Jeżeli będziemy mieli na polu zrobotyzowane ramię, które będzie działać na większej powierzchni, to możemy sugerować się naturą i tak sadzić różne gatunki, żeby te nawzajem się osłaniały. W przypadku zastosowania takiego ramienia to nie ma większego znaczenia, ponieważ i tak będzie ono precyzyjnie zbierać wybraną roślinę. Dzięki temu uzyskamy zbiory bez stosowania sztucznych nawozów i wyniszczających technik.
M.T.: Czy w pracach nad ŻukBotem pojawiły się jakieś trudności?
Przede wszystkim trzeba powiedzieć, że nasz zespół był młody i nie posiadał dużego doświadczenia więc wiele rzeczy musieliśmy się nauczyć w trakcie trwania prac. Dużą trudnością był projekt tego pojazdu. Z jednej strony nie jest to pojazd wielkości samochodu, do którego dostępne są części, a z drugiej strony nie jest to pojazd na tyle mały, żeby być pojazdem modelarskim. Bardzo dużo części wymagało od nas inwencji. Między innymi innowacją było zastosowanie bezszczotkowych silników prądu stałego znanych z dronów. Wykorzystaliśmy kontroler do tego, żeby używać ich jako silników napędowych. To pozwoliło nam nie mieć problemów z napędem w ŻukBocie. Dzięki temu miał on mocy zawsze pod dostatkiem, a czasem nawet za dużo. Wyliczyliśmy, że przy tej wielkości oponach i przełożeniu jakie jest zastosowane, to nasz ŻukBot mógłby osiągnąć prędkość 100 km/h. Nikt oczywiście nie odważył się zastosować takiej prędkości. Przy tak małym rozstawie osi spowodowałoby to jego wywrócenie. Oprócz tego musieliśmy od podstaw zaprojektować dozownik oprysków.
M.T.: Jak przydały się doświadczenia z pracy nad ŻukBotem do kolejnych konstrukcji dla rolnictwa?
Mogę szczerze powiedzieć, że duch ŻukBota będzie na pewno żył w projekcie pola uprawnego i kolejnych. Największą zaletą ŻukBota jest to, że dzięki niemu mieliśmy możliwość zwrócenia uwagi na poznanie problemów rolnictwa. Jest to przecież obszar, który bardzo szybko się zautomatyzował i zmiany technologii są w tej dziedzinie bardzo dynamiczne i głębokie. Jednocześnie jest to dziedzina, w której jest jeszcze bardzo wiele technologii do opracowania i wprowadzenia.
M.T.: Myślicie już o takich przyszłych rozwiązaniach?
Można pochylić się nad problemem wyzwań jakie stoją przed rolnictwem jakim jest problem gospodarki wodą lub to co mamy w Polsce – problem braku rąk do zbioru truskawek. Wszyscy wiemy, że dużo owoców nie jest zbieranych i ostatecznie gniją one na polach. A gdybyśmy stanęli z boku i popatrzyli się na to z bardzo szerokiej perspektywy, to dojdziemy do wniosku, że rolnictwo jest to dostarczanie żywności, a jest to przecież ważna rzecz.
M.T.: Jak według Pana jako konstruktora robotów będzie wyglądało rolnictwo w przyszłości?
Myślę, że przede wszystkim jakość rolnictwa mocno się podniesie. Na razie korzystamy z faktu, że mamy możliwość uprawy na wielkich obszarach, możemy stosować bardzo dużo nawozów sztucznych i bardzo dużo wody. Pamiętajmy jednak, że te wszystkie zasoby będą się kiedyś ograniczać. Z drugiej strony jest nas na świecie coraz więcej więc zapotrzebowanie na produkty rolnicze będzie rosnąć. To będzie wymagało od nas wymyślania nowych metod uprawy, a to nie jest wcale proste i to nie jest tak, że można się tego nauczyć błyskawicznie. Być może rolnictwo wspomagane komputerowo czyli na przykład poprzez sztuczną inteligencję, która pomaga rolnikom w podejmowaniu właściwych decyzji będzie czymś tak samo normalnym jak używanie w biurach komputerów. Myślę, że produkcja rolna będzie dużo większa, ponieważ będziemy jeść po prostu dużo więcej roślin niż mięsa. Będziemy z tego zadowoleni, ponieważ będą to produkty bardzo wysokiej jakości.
Ciekawym zagadnieniem jest też rolnictwo miejskie. Uważam, że w przyszłości coraz bardziej będziemy zainteresowani tym, żeby warzywa rosły bliżej nas. Nie będziemy chcieli, żeby przejeżdżały one 600 km, żeby dotrzeć na sklepowe półki. Zamiast tego będziemy sięgać po warzywa uprawiane na dachu sklepu przy wykorzystaniu zautomatyzowanych systemów upraw. Mimo tego, że w rolnictwie będzie coraz więcej technologii, to jedzenie będzie bliżej nas, co jest całkiem przyjemną wizją. Lepiej jeść naprawdę świeże owoce niż przerobione i zapakowane substancje, które nawet nie przypominają tego co rośnie na krzaku.
M.T.: Bardzo dziękuję za rozmowę.
Dziękuję.





Zobacz też:







