Robotyka badawcza

Partnerzy




Roboty coraz bliżej ludzi dzięki mięśniom inspirowanym naturą
Naukowcy opracowali nowatorskie sztuczne mięśnie inspirowane naturą, które mogą znacząco poprawić zdolności ruchowe robotów. Nowa technologia bazuje na elastycznych, lekkich materiałach, które naśladują działanie ludzkich mięśni, umożliwiając robotom wykonywanie bardziej precyzyjnych, płynnych i naturalnych ruchów. Badacze podkreślają, że rozwiązanie to...
Czytaj więcej- Zautomatyzowany robot inicjuje nowe badania genetyczne
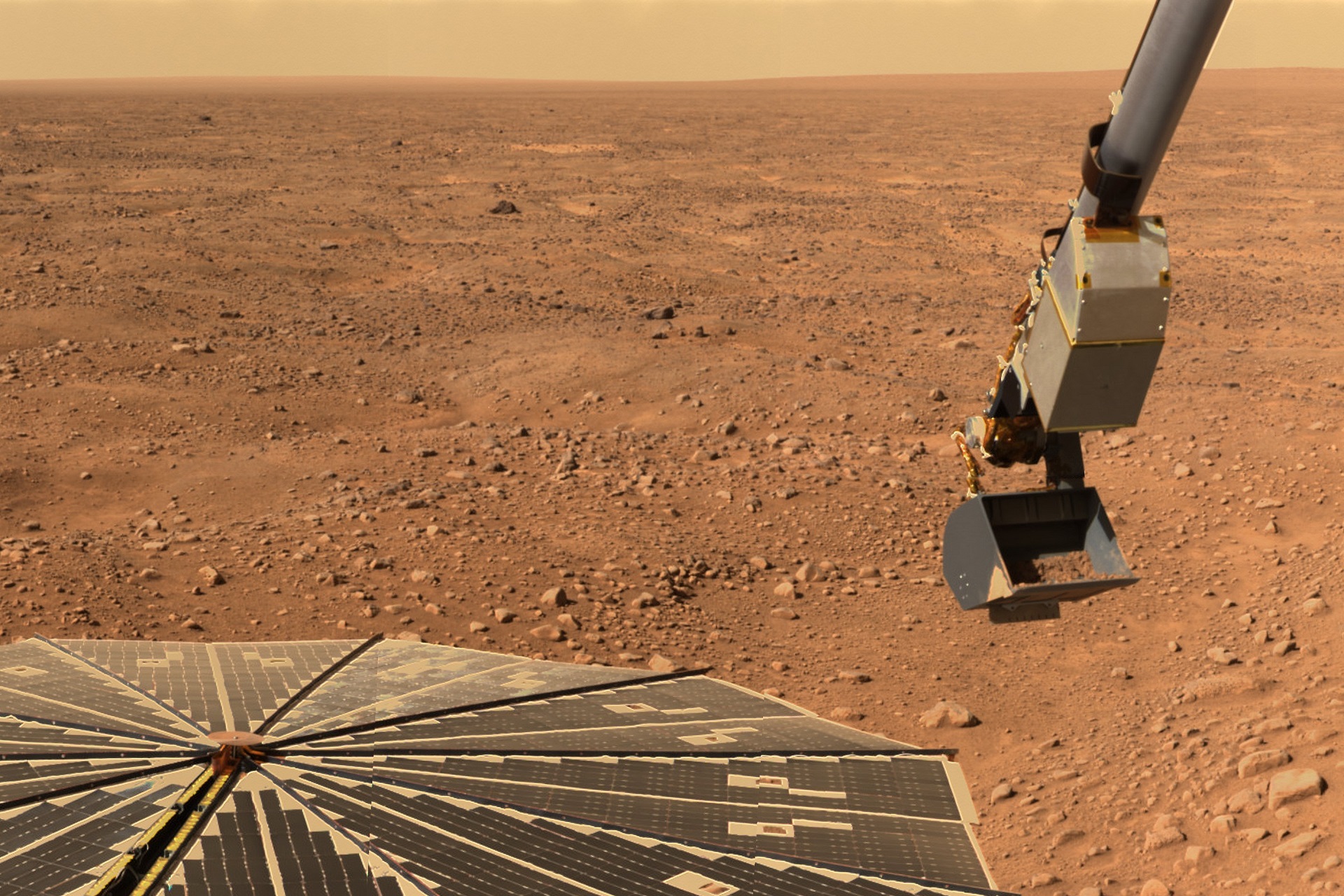
- Robot do eksploracji jaskiń na Marsie
- „Inteligentne roje” maleńkich robotów
- Autonomiczny pojazd podwodny Hydrus
- Roboty pomogą ludziom w kosmosie
- Globalny projekt stworzenia ogólnego robota
- Autonomiczny robot do syntezy chemicznej
- Zautomatyzowane szybowce sprawdzają prądy oceaniczne
- Najmniejsze i najlżejsze roboty na świecie

Roboty coraz bliżej ludzi dzięki mięśniom inspirowanym naturą